Control Servos and Motors¶
In this project, we have 12 servos and two motors working simultaneously.
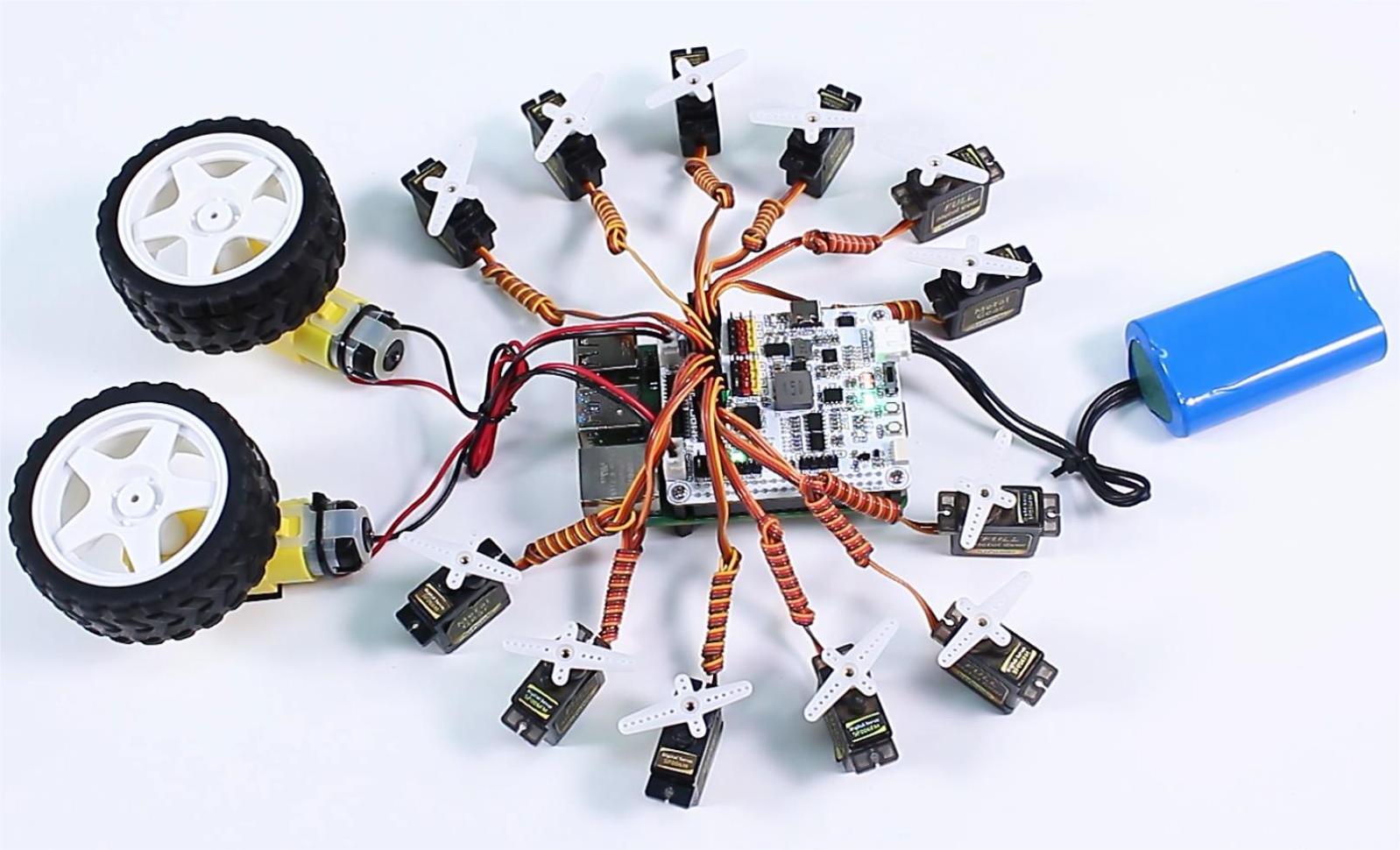
However, it’s important to note that if your servos and motors have a high starting current, it’s recommended to start them separately to avoid insufficient power supply current, which could lead to the Raspberry Pi restarting.
Code
from robot_hat import Servo, Motors
import time
# Create objects for 12 servos
servos = [Servo(f"P{i}") for i in range(12)]
# Create motor object
motors = Motors()
def initialize_servos():
"""Set initial angle of all servos to 0."""
for servo in servos:
servo.angle(-90)
time.sleep(0.1) # Wait for servos to reach the initial position
time.sleep(1)
def sweep_servos(angle_from, angle_to, step):
"""Control all servos to sweep from a start angle to an end angle."""
if angle_from < angle_to:
range_func = range(angle_from, angle_to + 1, step)
else:
range_func = range(angle_from, angle_to - 1, -step)
for angle in range_func:
for servo in servos:
servo.angle(angle)
time.sleep(0.05)
def control_motors_and_servos():
"""Control motors and servos in synchronization."""
try:
while True:
# Motors rotate forward and servos sweep from -90 to 90 degrees
motors[1].speed(80)
time.sleep(0.01)
motors[2].speed(80)
time.sleep(0.01)
sweep_servos(-90, 90, 5)
time.sleep(1)
# Motors rotate backward and servos sweep from 90 to -90 degrees
motors[1].speed(-80)
time.sleep(0.01)
motors[2].speed(-80)
time.sleep(0.01)
sweep_servos(90, -90, 5)
time.sleep(1)
except KeyboardInterrupt:
# Stop motors when Ctrl+C is pressed
motors.stop()
print("Motors stopped.")
# Initialize servos to their initial position
initialize_servos()
# Control motors and servos
control_motors_and_servos()